
Automated Mobility Research Center 자율주행 모빌리티 연구센터
Safety First, Innovation Faster
아주대학교 자율주행 모빌리티 연구센터는 자율주행자동차를 비롯하여 미래 모빌리티 사회로 진화하기 위해 필요한 융합연구를 수행합니다. AI, 빅데이터, 클라우드, 가상환경(VR) 등 혁신적인 기술을 자율주행자동차, 개발 및 검증 환경, 자율주행 인프라 등에 적용하기 위한 다학제간 융복합 연구를 지향합니다.
자율주행 모빌리티 분야 중 안전성(safety first) 확보를 위한 연구를 중점적으로 수행하고 있습니다. ISO26262의 기능안전(functional safety)이나 ISO/PAS 21448의 “의도된 기능의 안전”(safety of the intended functionality, SOTIF) 관점에서 V자 개발 및 검증 모형 내 소프트웨어 및 알고리즘의 안전성 연구를 진행하고 있습니다. 뿐만 아니라 AI의 적용을 위한 안전성, 예를 들어서 예상치 못한(unknown or unexpected) 시나리오 및 해당 가상 데이터 생성, 이를 기반으로 한 학습 및 성능 개선, AI의 안전성 제고를 위한(fail-operational) 이중화 구조 등이 연구되고 있습니다.
혁신적인 기술도입의 가속화(innovation faster)를 위하여 산학협력생태계를 조성하고 개발 및 검증 툴체인(toolchain)관점의 연구를 진행하고 있습니다. 산업체에서 제공하는 툴을 적극적으로 활용하여 개발 및 검증의 효율성을 제고하는 방법론을 연구하고 있으며 이러한 과정을 통하여 생성된 데이터를 축적, 가공, 탐색 등 데이터의 연결성을 통한 자율주행 빅데이터 생성 및 활용 연구도 진행되고 있습니다. 이러한 툴체인과 빅데이터의 도입은 자율주행관련 연구를 가속화 시킬 것으로 생각하고 있습니다.
주요활동
- - 미래자동차 전문 R&D 인력 양성
-
- - 자율주행 및 AI 기술을 미래 모빌리티 분야에 적용하는 창의적 연구 성과 창출
- - 다학제간 융합 연구를 통한 시너지 확보
- - 자율주행자동차 플랫폼 기반 구축을 통한 연구 사업 지원 및 재원 수주
- - 포럼 및 워크숍 개최를 통한 홍보 및 우수 학생 유치에 기여
- - 캠퍼스 리빙랩 수준으로의 확대를 통한 연구 개발 활성화 및 사업화 추진
- - 미래모빌리티 산학연 협의체 활동을 통한 국내외 미래 모빌리치 연구분야 선도
Professors and Researchers 참여연구원
| 소속학과 | 성명 | 직위 | 주요 연구 및 활동 |
|---|---|---|---|
| 교통공학과 | 윤일수 | 교수 |
V2X 기반 화물차 군집 주행 운영기술 개발 외 다수, 도로교통공사, 경찰청, 경기도, 국토부 기술 자문위원 |
| 이용주 | 부교수 |
교통수요분석, 대중교통, 교통안전 및 첨단교통 세계도로협회(PIARC) 기술분과위원 |
|
| 소재현 | 조교수 | 교통운영, 스마트시티/교통, 첨단교통 및 자율주행 | |
| 기계공학과 | 송봉섭 | 교수 |
자율주행 자동차 개발 외 다수, 한국자동차공학회 이사, KNCAP 기술위원 |
| 전용호 | 교수 |
경량차체 조립 기술 개발 외 다수, 대한기계학회,한국정밀공학회 이사, JMST Asso. Editor, IJPEM Editor |
|
| 산업공학과 | 이주연 | 교수 |
전기자동차, ESS, 스마트그리드, AI 연구 외 다수, 산업통상자원부 국가옴부즈만(차관급), 4차산업혁명위원회 운영위원 |
| 소프트웨어학과 | 이정태 | 교수 |
자동차 SW 전장제어와 기능 안정성 연구 외 다수, 자동차 SW 연계전공 및 융복합트랙 운영 |
| 황원준 | 부교수 | 인공지능 알고리즘 | |
| 수학과 | 권순선 | 부교수 |
유압브레이커 하자원인 예측 모델 및 로직 설계 외 다수, 분당서울대병원 의생명연구원 선임연구원 |
| 최수영 | 교수 |
전기 비저항 데이터를 이용한 지하 매설물 탐사 연구 외 다수, 국가수리과학연구소 연구원 |
|
| 전자공학과 | 구형일 | 교수 |
임베디드화 고려한 인공지능 알고리즘 최적화 기법 연구 외 다수, 퓨리오 AI 기술이사 |
| 허용석 | 부교수 | 인공지능 알고리즘 |
아주대학교 자율주행 모빌리티 연구센터에서 기업과 협력하는 개발 업무에 관심 있는 유능한 아주대학교 학생 인턴을 모집합니다.
아주대학교 자율주행 모빌리티 연구센터는 학내 미래 자동차 및 모빌리티 연구를 집중적으로 육성하기 위해 2020년 9월에 설립되어, 현대자동차, 한화시스템, AVL Korea, IPG Korea, 모라이 등 자율주행 관련 기업과 활발한 연구협력을 추진하고 있습니다. 또한 자동차안전연구원, 경기도 자율주행센터, 한국산업기술시험원 등과 상호협력을 하고 있습니다.
- 업무
-
자율주행 모빌리티 분야 데이터 생성 및 가공, AI 알고리즘 개발을 위한 실무 업무
- “판교지역 야간 주행 데이터 생성”, “가상 환경 구성 및 데이터 생성”, “렌트카 관련 데이터 분석 및 관리”, “판교 제로셔틀 데이터 관리” 등
- 채용개요
-
- 1. 인원: 2~3명
- 2. 채용직위: 인턴연구원
- 3. 지원자격: 아주대 학부 3학년 이상, 휴학생, 졸업생 가능
- 4. 우대사항
- 데이터, AI 등에 관심을 두고 공부해 온 학생 - 컴퓨터 활용능력 우수자(Python, R, ROS 등)
- 근무조건
-
- 1. 근무시간: 주 20~40시간, 월~금 중 탄력근무, 채용 후 근무시간 합의
- 2. 보수: 월 50~100만원(세금포함)
- 3. 계약기간: 2022년 7월 계약일로부터 6개월(조정가능)
- 4. 근무장소: 아주대학교 대학원 실험실
- 지원방법
- 1. 서류접수 기간: 2022. 6. 16.(수) – 6. 30.(수) 18:00 (추가 선발)
- 2. 제출서류
- - 자유양식 CV(필수 포함 사항: 소속, 개인연락처, 재학 관련 사항)
- - 전 학년 성적증명서
- - 지원서류는 1개 PDF 파일로 이메일로 제출, 파일명: "인턴연구원(기획)_이름"
- - 제출 및 문의: 이메일 접수(srzr2001@ajou.ac.kr), 031-219-3604
- 선발 절차
- 1. 서류심사 및 필요 시 합격자 개별 통보 이후 면접
- 2. 유의사항
- - 적격자가 없을 시 채용하지 않을 수 있습니다.
- - 제출한 서류는 반환하지 않습니다.
- - 수업시간과 근무시간이 조율되지 않은 경우 차순위 합격자 선발
Research 연구분야
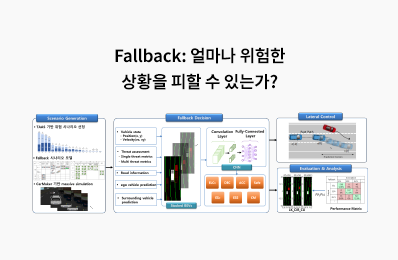

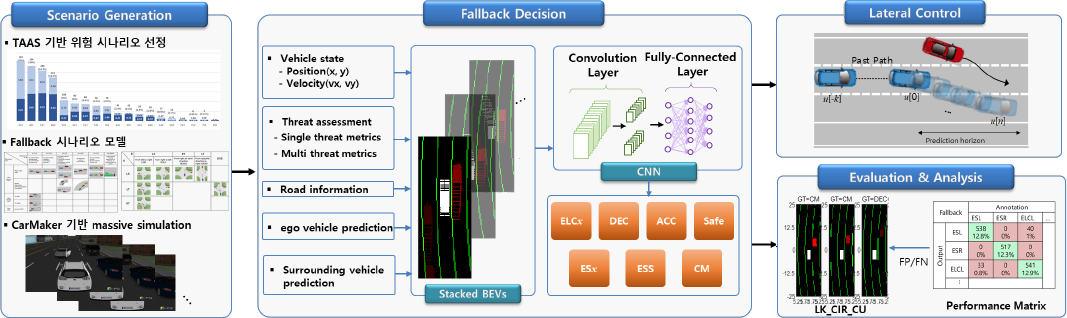
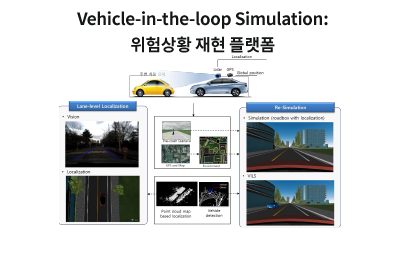
자율주행 시 Fallback을 위한 판단 및 제어 기술 개발
Description
긴급 제동 장치(AEB)의 도입으로 많은 사고를 예방할 수 있으나, 여전히 제동만으로는 피할 수 없는 사고들이 존재한다. 자율주행 3,4단계에서 요구되는 fallback이란 긴급 제동뿐만 아니라 긴급조향, 충돌경감을 고려한 충돌위험을 최소화하는 기술이다. 본 연구는 주행 중 위험 상황을 마주하였을 때 회피를 위한 fallback 전략 판단 및 제어 알고리즘을 개발한다. 판단 및 제어 알고리즘을 개발하고 검증하기 위해서 실도로 교통사고 통계를 기반으로 선정한 시나리오들을 massive simulation을 통해 생성하였다. 위험상황 회피를 위한 전략으로는 가/감속, 차선내 회피(좌/우), 차선변경(좌/우), 갓길 회피, 충돌경감으로 7개의 전략을 가지고 있다. 위험도를 최소화하는 전략을 판단하기 위해서 자차량의 상태값, 주변차량의 위험도 및 예측 궤적, 도로 환경들을 이용하여 simplified BEV(Bird’s Eye View)를 생성한다. 이를 다시 fallback 전략을 적용한 7장의 BEV를 쌓아 stacked BEV로 생성하고, 이를 CNN 기반의 판단 알고리즘의 입력으로 이용하여 fallback 전략을 판단한다. 마지막으로 최적화 기법을 기반으로 차량의 물리적 움직임과 주변 환경(차량, 도로)를 고려한 MPC(Model Predictive Control)기반의 횡방향 제어기를 설계하여 판단에 따른 fallback 전략을 수행한다.
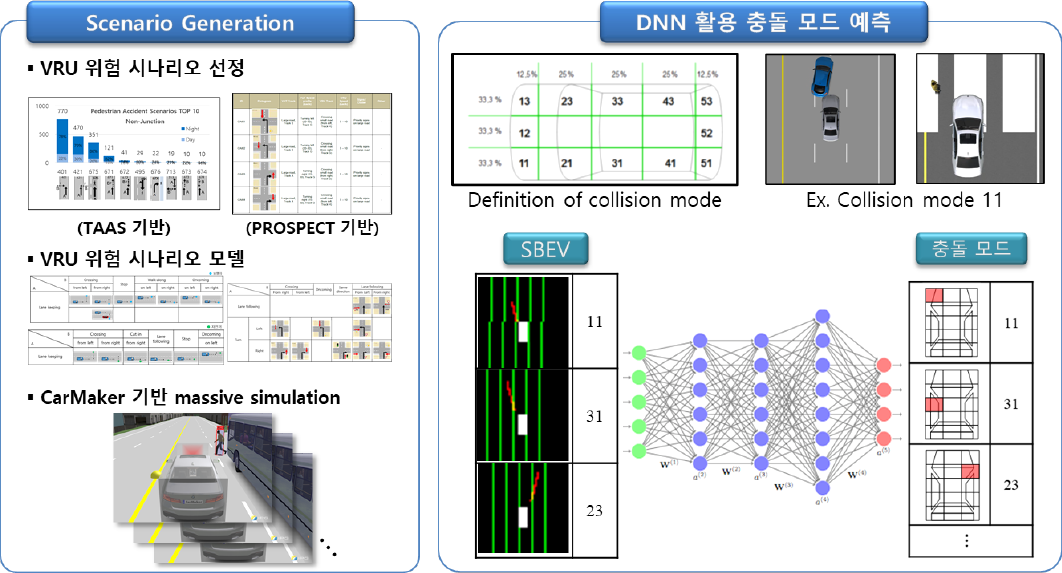
VRU Pre-crash 빅데이터 구축 및 충돌모드 예측 모델 개발
Description
해당 연구는 ADAS/자율주행 기술 중 충돌 회피 보조 기능이 작동하더라도 사고가 발생하는 경우, 충돌 유무에 대한 예측 뿐만 아니라 상대차량 또는 교통약자가 자차량에 충돌하는 부위(충돌 모드)를 판단하는 모델을 개발하는 연구이다. ADAS 및 자율주행의 상용화에 따라 차량에 환경 센서(e.g. 카메라, 레이더, 라이다)가 장착되고 있으며 이러한 센서 정보를 통해 충돌을 피할 수 없는 경우, 프리텐셔너(pre-tensioner) 또는 에어백과 같은 기존의 수동안전시스템과 자동긴급제동(AEB), 자동긴급조향(ESA) 등의 능동안전 시스템이 통합적으로 적용될 수 있다. 모델의 학습에 필요한 데이터 생성을 위해 교통사고 통계, safety report를 기반으로 기본 시나리오 모델을 생성했으며, MATLAB 및 IPG automotive의 CarMaker 기반 massive simulation을 수행하여 상세 시나리오를 생성하였다. 판단 모델의 경우, simplified bird’s eye view (SBEV)를 입력으로 받는 convolutional neural network(CNN)를 사용한다. SBEV란 주행 환경(차량, 교통약자, 차선 등)의 요소들을 다각형과 선을 이용해 생성한 이미지(RGB)를 의미한다. SBEV의 R 채널에는 주변 물체의 궤적 및 shape(width, length, heading) 정보 뿐만 아니라 물리 기반의 위험도 알고리즘 정보를 할당하며, G 채널에는 차선 정보가 표기된다. 추가적으로 충돌 모드의 직관적인 분석을 위해 자차량의 shape을 하얀색으로 표기하였다. 앞에서 언급된 상세 시나리오 데이터를 기반으로 생성된 SBEV를 이용하여 CNN을 학습하며, 학습된 network를 통해 충돌 모드 판단을 수행한다.
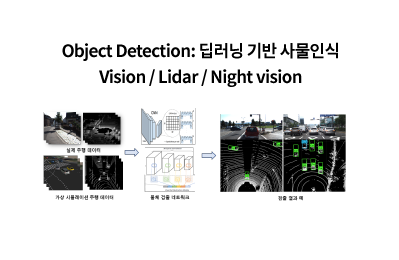
라이다를 이용한 딥러닝 기반 객체 검출
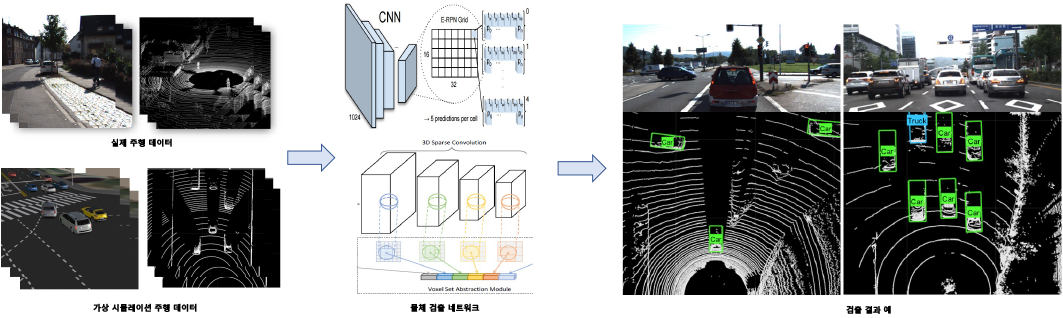
Description
3D LiDAR(Laser Detection and Ranging) 센서에서 출력되는 Point Cloud를 통하여 전방위 정밀한 정보의 데이터를 얻을 수 있다. 본 연구는 이를 기반으로 주변 객체(Vehicle, Cyclist, Pedestrian, Other obstacles)에 대해 Deep learning network를 이용하여 검출에 대해 검증 및 평가하는 연구이다.
Deep learning(DL)을 이용한 LiDAR 센서 기반의 객체 검출을 위하여 데이터를 공개되어 있는 주행 데이터 및 알고리즘 평가와 검증, 다양한 학습 데이터 구축을 위한 가상 시뮬레이션으로 추출한 주행 데이터, 실제 차량의 센서로 부터 획득한 주행 데이터 등을 구축하고 있으며 이를 기반으로 전방차량(Primary vehicle)에 대한 성능 평가와 위험 상황(Pre-crash scenario)에서의 알고리즘 안정성 평가를 진행 중에 있다.
또 한 가상 시뮬레이션 데이터를 활용하기 위하여 실제 센서 데이터 간의 정합성 연구도 진행 중이다.

ACES ICC 기업협업센터(ICC)
설립 배경 및 필요성
국내
- - 2019년부터 3년간 2조 4천억 투자, 스마트시티 국가 시범도시(세종/부산) 조성
- - 세종시의 7대 혁신 서비스 핵심인 모빌리티: 공유기반 교통수단, 5G 기반 교통 빅데이터, 드론,로봇배송, 미래형 이동수단 도입 등 추진
국외
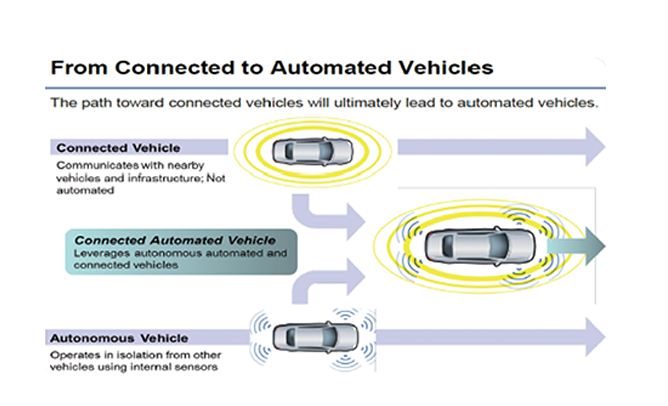
- - 미국 교통부: AV 3.0 발표 (협력형 자율주행)
- - 교통체계 효율성 향상: CACC, 속도 조화, 군집주행, 지체제어, 퍼스트/라스트 마일 및 대중교통 등 포함
- - 유럽연합(EU): Connected Car, 자율주행차 보급 활성화 위한 유관부처간 협력체계 구성
- - 암스테스담 선언: 2019년까지 C-AV 실현 위해 범유럽 차원 협력
Parters 참여기업

산학협의체 기술세미나
- - Safety and Validation in AI and Automated Driving
- 한학협의체 간 기술 공유
2020 한국 AVL 재직자 교육
- - 연료전지 자동차 성능 모델링 및 시뮬레이션
- PEMFC 수소자동차의 개념과 모델링 과정으로 완성된
해석 모델을 이용하여 PEMFC와 수소자동차의 성능을
평가하고 PEMFC와 배터리의 동력 분배에 따른 수소자동차
연비를 비교 분석

수혜학생 역량 강화
- - 현대자동차, 삼성전자 등 관련 기업 산학프로젝트 수행 참여
- - 한국자동차연구원, 한컴MDS, 전자부품연구원 등 유관기관 현장실습
추진 - - 단기교육과정(KEA 주관), 학회 주관 세미나/워크샵 참여 독려
AVL 업무협약
- - AVL SW 라이센스(교육용 및 연구용) 기증 및 활용
- - 산학협력 교육센터 개소를 통한 전산 강의실 등 교육 인프라의 공동
활용 - - 스마트 모빌리티 분야의 선도인력 양성을 위한 재직자 교육 공동 추진
- - 정부 과제 공동 컨소시엄 참여 등의 스마트 모빌리티 분야 산학협력
- - 유료 회원제 가입을 통한 협력, 지원 활성화


한화시스템 업무협약
- - 나이트비전 기술 공동 연구
- - 관련 연구기기 및 인프라 활용
- - 협의체 운영 및 상호 기술 자문
- - 관련 교육 프로그램 제공
경기도 자율주행센터 업무협약
- - 자율주행 테스트베드 및 빅데이터
- - 자율주행 연구를 위한 PC, 소프트웨어 제공
- - 경기도-대학 간 빅데이터 시스템 구축을 통한 연구 결과 공유










| 참여기업명 | 업종 | 주생산품목 | 지역 |
|---|---|---|---|
| ㈜스프링클라우드 | 전기/전자 | 자동차부품 | 경기도 |
| 지멘스인더스트리소프트웨어㈜ | 전기/전자 | 소프트웨어 | 서울시 |
| ㈜케이씨모터스 | 기계/금속 | 자동차부품 | 경기도 |
| 네이버시스템㈜ | 정보통신/멀티미디어 | 소프트웨어 | 서울시 |
| ㈜씨피프티원 | 정보통신/멀티미디어 | 소프트웨어 | 서울시 |
| ㈜리텍 | 기계/금속 | 자동차부품 | 경기도 |
| ㈜윈텍오토메이션 | 기계/금속 | 자동차부품 | 경기도 |
| ㈜에프티에스코리아 | 기계/금속 | 자동차부품 | 경기도 |
| ㈜하나텍시스템 | 정보통신/멀티미디어 | 소프트웨어 | 경기도 |
| 한국전기차충전서비스㈜ | 전기/전자 | 소프트웨어 | 제주도 |
| 제주전기자동차서비스 | 전기/전자 | 소프트웨어 | 제주도 |
| 피앤이시스템즈 | 전기/전자 | 전자부품 | 경기도 |
| 중앙제어 | 전기/전자 | 전자부품 | 충청북도 |
| 유디엠텍 | 전기/전자 | 소프트웨어 | 경기도 |
| 이지로보틱스 | 전기/전자 | 전자부품 | 경기도 |
| KT엠모바일 | 정보통신/멀티미디어 | 소프트웨어 | 서울시 |
| 지필로스 | 전기/전자 | 소프트웨어 | 경기도 |
| 한컴MDS | 정보통신/멀티미디어 | 소프트웨어 | 경기도 |
| 유콘시스템 | 전기/전자 | 전자부품 | 대전시 |
| 유니셈 | 전기/전자 | 전자부품 | 경기도 |
| 모션디바이스 | 전기/전자 | 전자부품 | 경기도 |
| ㈜이타스코리아 | 전기/전자 | 소프트웨어 | 경기도 |
| 코리아료산 | 기계/금속 | 소프트웨어 | 서울시 |
| 베스텔라랩 | 정보통신/멀티미디어 | 소프트웨어 | 서울시 |
| 르네사스일렉트로닉스한국 | 전기/전자 | 전자부품 | 서울시 |
참여 문의 메일 : aces@ajou.ac.kr
Education 인력양성
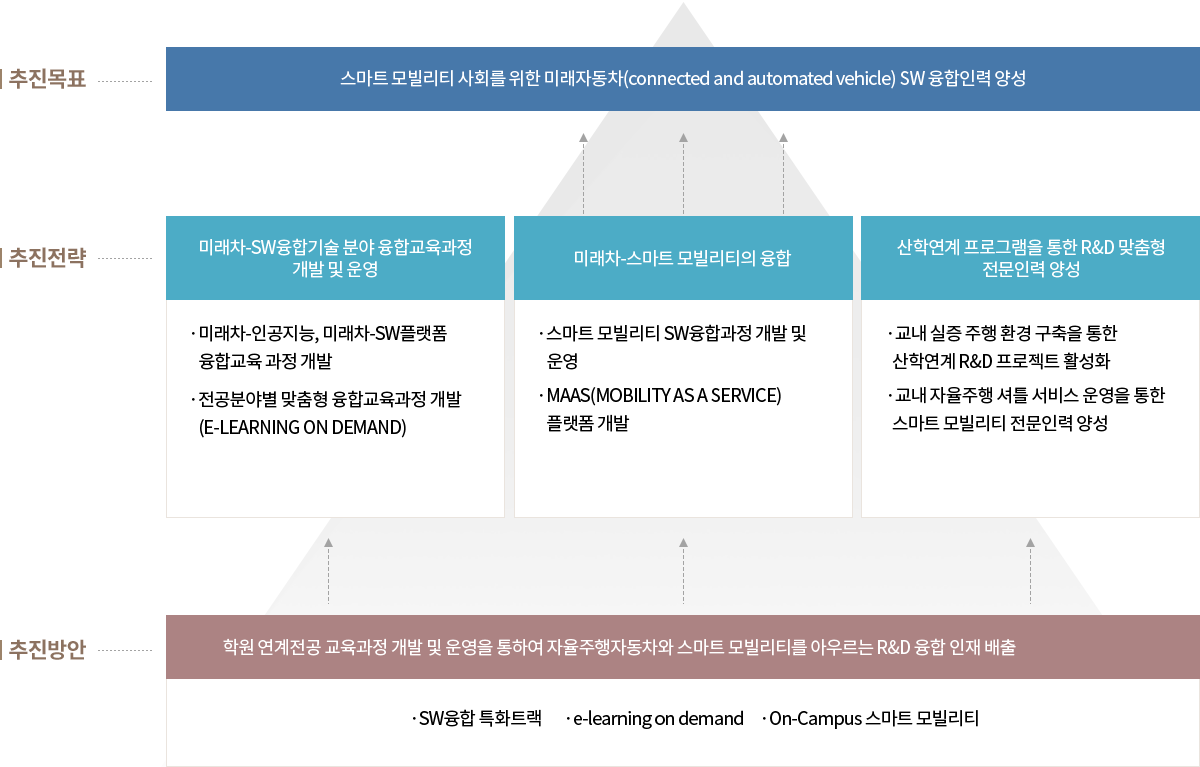
인력양성사업 목표 및 추진방안
- 미래형자동차 R&D 전문인력양성사업 (산업통상자원부, 2019.3.1~2022.2.28)
인력양성사업 학위(트랙)과정 커리큘럼
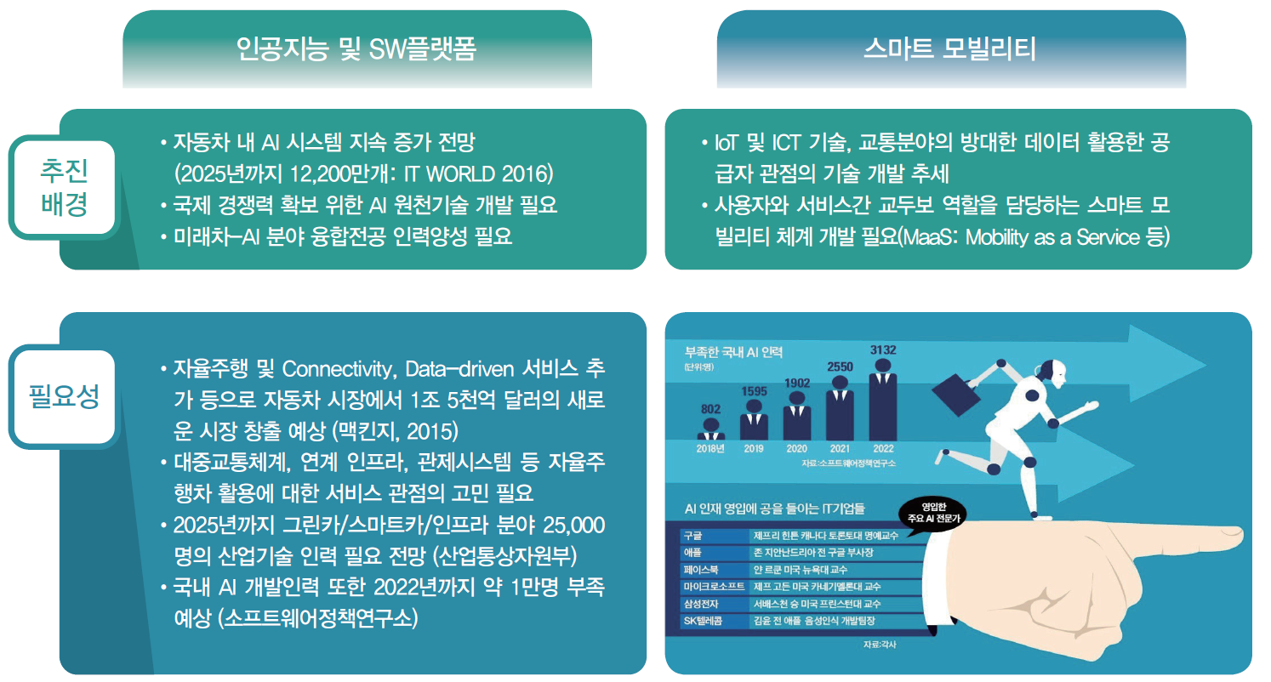
- ·자율주행, SW플랫폼, 스마트 모빌리티 분야 특화과정
- ·자율주행 관련 AI, SW 기반 융합기술 및 관련 교과목, 세미나, 현장실습 강화

인력양성사업 연차별 실적 목표
- 미래형자동차 R&D 전문인력양성사업 (산업통상자원부, 2019.3.1~2022.2.28)
| 구분 | 성과지표명 | 단위 | 2019목표 | 2020목표 | 2021목표 |
|---|---|---|---|---|---|
| 필수지표 | 수혜인원 수 | 명 | 13 | 21 | 18 |
| 배출인원 수 | 명 | 5 | 8 | 14 | |
| 취업자 수 | 명 | 4 | 7 | 8 | |
| 취업율 | % | 80 | 80 | 80 | |
| 산학협력프로젝트 수 | 수 | 3 | 3 | 3 | |
| 교육과정 개발 건수 | 수 | 2 | 2 | 1 | |
| 융합형 교육과정 개설수 | 수 | 3 | 2 | 2 | |
| 교육시간 | 시간 | 250 | 270 | 300 | |
| 컨소시엄 참여기업 수 | 개 | 10 | 13 | 15 | |
| 현장실습 추진건수 | 건 | 3 | 3 | 3 | |
| 기술전문인력 강사 참여 인원 | 명 | 3 | 3 | 3 | |
| 자율지표 | 특허출원 | 건 | 3 | 2 | 2 |
| 자율주행대회 참가 | 건 | 1 | 0 | 1 |
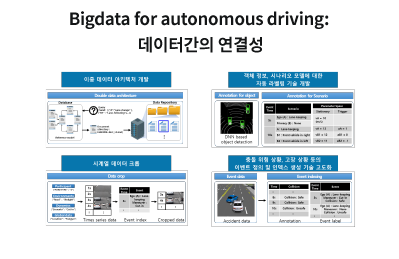
Data Repository
Data Repository 소개

- - 자율주행차량은 방대한 실주행 데이터를 기반으로 다양한 학제간 융합연구 및 응용연구를 추진하는데 목적이 있으며, 따라서 주행 데이터의 표준화된 공유 체계 구축은 필수적
- - 자율주행차의 주행 실적이 누적됨에 따라 데이터의 규모는 지속적으로 확대, 빅데이터의 보관 및 공유 체계를 용이하게 하기 위해 Data Repository 구축
- - 본 ICC에서 수집한 데이터를 온라인 상에서 누구나 접속 가능하도록 개방함으로써 본 ICC의 국내·국제 공동연구체계 기반 구축, 타 자율주행 연구센터와의 주행
- - 데이터 교류를 통한 데이터의 다양성 확대(도로환경, 차종, 주행조건 등) 가능